-
![机械手的机械形式---焊接机器人-数控焊机]()
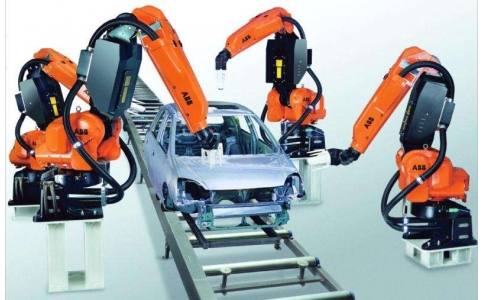
机械手的机械形式---焊接机器人-数控焊机
机械手越来越多的应用于工业自动化领域,如喷涂机械手,注塑机械手,焊机机械手,搬运机械手,本文主要介绍在数控机床中机械手的应用以及常见的结构。在自动换刀数控机床中数控机械手的形式也是多种多样的.常见的的几种形式。
2020-03-21
-
![数控焊接机制造系统FMS--焊接机械手]()
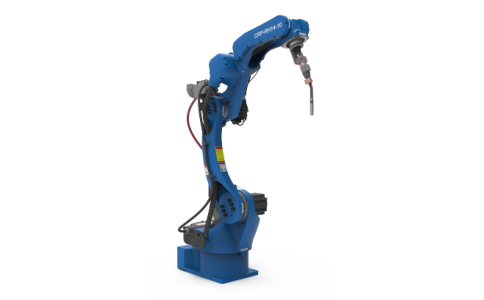
数控焊接机制造系统FMS--焊接机械手
柔性制造技术FMS是由统一的计算机控制系统(信息流)、物料(工件、刀具)和翰送系统(物料流)连接起来的一组加工设备,能在不停机的情况下实现多品种、小批量零件的加工,并具有一定管理功能的自动化制造系统。这里柔性是指时间和空间的灵活性.而自动化是指将手工操作降至最低程度。
2020-03-21
-
![焊接,也称作熔接]()
-
![焊接的工业艺术]()
焊接的工业艺术
焊接的出现迎合了金属艺术发展对新工艺手段的需要。
艺术创造与工艺方法,永远是密不可分的。作为一种工业技术,焊接的出现,迎合了金属艺术发展对新的工艺手段的需要。而在另一方面,金属在焊接热量作用下,所产生的独特美妙的变化,也满足了金属艺术对新的艺术表现语言的需求。在今天的金属艺术创作中,焊接正在被作为一种独特的艺术表现语言而着力加以表现。金属焊接艺术,可以作为一种相对独立的艺术形式,以分支的方式从传统的金属艺术中分离出来,这是因为焊接具有艺术性。2020-03-21
-
![焊接机器人保养需注意的事项]()
焊接机器人保养需注意的事项
一自动焊接机器人操作人员中的链条是一个易损件,每年至少检查一次,并及时处理。二每次跳闸开关的动作灵活性和可靠性都要经常检查,以避免松动和损坏。三经常检查电路接头,保持连接牢固,插头可靠。四工作站控制器和手动控制器内的灰尘应每三个月用压缩空气吹一次。五电器、旋钮、开关要经常检查,保持清洁,接触良好,以免误操作。六导轨、滑架、丝杠螺母等运动部件经常进行检查和清洗,防止灰尘堆积,影响运动部件的柔性运动。
2020-03-21 aipaae
-
![焊接机器人存在的问题和解决措施]()
焊接机器人存在的问题和解决措施
焊接缺陷分析及处理机器人焊接采用富氩混合气体保护焊。焊接过程中的焊接缺陷一般包括焊接偏差、边缘和气孔等,具体分析如下:(1)焊接偏差可能是由于焊接位置不正确或焊枪搜索问题引起的。此时,要考虑TCP(枪的中心位置)是否准确,并进行调整。如果经常发生这种情况,检查机器人的每个轴的零点位置,并通过重新校准零点来校正它。(2)封边的发生可能是焊接参数选择不当、焊枪角度或焊枪位置不当,可通过调整电源的大小来
2020-03-21 aipaae
-
![焊接机器人焊接缺陷分析及处理方法]()
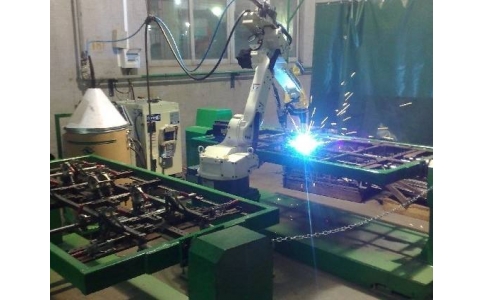
焊接机器人焊接缺陷分析及处理方法
机器人焊接采用富氩混合气体保护焊,焊接过程中的焊接缺陷一般包括焊接偏差、咬边、气孔等,具体分析如下:(1) 焊接偏差可能是由于焊接位置不正确或在寻找焊枪时出现问题造成的。此时,请考虑TCP是否准确并进行调整。如果经常发生这种情况,必须检查机器人的每个轴的零位置,并重置为正确。(2) 咬边可能是由于焊接参数选择不当、焊枪角度或焊枪位置不当造成的。可适当调整电源,改变焊接参数,调整焊枪姿态和焊枪与工件
2020-03-21 aipaae
-
![焊接机器人的好处]()
焊接机器人的好处
(1)稳定和提高焊接质量,保证其均匀性。焊接电流、电压、焊接速度、焊接干伸长长度等焊接参数决定了焊接结果。采用机器人焊接时,各焊缝的焊接参数是恒定的,焊接质量受人为因素影响较小,降低了对工人操作技术的要求。因此,焊接质量稳定。而手工焊接时,焊接速度、干伸长等都在变化,因此很难达到质量均匀性。(2)改善劳动者的劳动条件。机器人焊接工人只用于装卸工件,远离焊接弧光、烟尘和飞溅物等,对于点焊工人不再携带
2020-03-21 aipaae